РУКМА-ВИМАНА
Сутра 1
«О принципах функционирования Рукма-виманы»
(Atha Rukma Vimaana Nirnayaha)
Махариши Бхарадваджа:
Бодхананда Вритти:
Эта вимана золотого цвета. Поэтому она называется Рукма-вимана. Рукма означает
золото. Рукма должна изготавливаться исключительно из Raajaloha. При
соответствующей технологии, можно получить золотой Raajaloha. Именно этот
металл должен использоваться в изготовлении данной виманы.«Янтра-бинду»
утврждает: «Как только Raajaloha приобретет золотой цвет, его можно
использовать в изготовлении виманы».
Peetha
Peetha (дно) рукма-виманы должно иметь форму черепахи, длину 1000 футов и толщину 1 фут, или любые другие
размеры. На нижней стороне peetha с восьми сторон, оставляют промежутки длиной 20 футов. В центре каждого
промежутка вращающимися keelaka присоединяются зажимы в виде птичьих клювов.
Затем в каждом из 8 центров парами крепятся двойные железные шарики, или
колеса.
Ayas-chakra
Лалла приводит описание формы ayaschakra-pinda: «Они должны быть круглые как
жернова, 12 футов
в длину и в ширину, и весить 8 kankushta. Они вставляются в клювообразные
зажимы, расположенные в восьми центрах. Из каждого chakra-pinda к
электрическому генератору протягивается проводка с переключателями».
Batinikaa-Stambha,
или ось с кнопочным переключателем
Устанавливают оси шириной 1
фут и длиной 4 фута. Их снабжают переключателями,
подведенными к электрической оси. В середине этой оси, с обеих сторон проводами
закрепляют колеса шириной 8
дюймов. Проводка, идущая от электрической оси, должна
обрамлять колеса и закрепляться на другой оси при помощи внутренних шарниров.
На верхних концах осей закрепляются кубкообразные чаши с кнопочными
переключателями в виде бутонов, а также колеса и ключи: при нажатии
переключателя, за счет электрического контакта приходят во вращения колеса
другой оси. Затем колеса электрической оси также начинают вращаться со
скоростью 5000 лин-ка.
Обеспечение полета
Под действием этой электрической силы, колеса ayah-pinda, расположенные под
дном, начинают ударять о дно и двигать виману вверх. При манипулировании
переключателями осями с колесами, расположенными на верхней стороне peetha, оси
начинают быстро вращаться, увеличивая скорость виманы. За счет толчков нижних
колес, а также работы расположенных над ними осей, вимана набирает высоту,
совершая величественный полет.
Колеса «электрической» трубы, способствующие полету
Над peetha, на расстоянии 1
фут друг от друга, устанавливаются naala, или трубы. С
обеих сторон каждой naala соответствующими keelaka закрепляются зубчатые колеса
диаметром 2 фута
и толщиной 1 фут.
Электрические провода, проведенные через эти keelaka, окаймляют колеса и
достигают основания каждой naala. Далее они подсоединяются к колесам, имеющим
толщину и диаметр 3 фута.
Среди 20 naala, в центре устанавливается ось.
Согласно Нараяне, подготавливают опору шириной 4 фута и высотой 4 фута, посередине которой
делают отверстие диаметром 2
фута. Вверху и внизу этого отверстия, а также в центре
его закрепляют keelaka. Для притяжения электрического тока, на нижнем крае
закрепляют два keelaka, шесть колес со стеклянными покрышками, с проводами, а
также naala и кожух.
В средней части отверстия, для передачи электрического тока закрепляют
keelaka от пяти колес, а также сами пять колес, стеклянную оболочку, две трубы
naala, два провода, подсоединенные к трем стержням, и сосуд, содержащий масло
veginee. С подачей электрического тока, колеса на верхнем крае приводятся во
вращение подсоединенными к ним ключами. Напротив отверстия, при помощи gumbha
keelaka, закрепляется большое колесо. Подобным образом, колеса закрепляют у
основания каждой опоры. Сверху прилаживают pattika, или плоскую ленту, которая
начинается от ключа колеса samsarga, и заканчивается у передней стороны
электрической янтры. При повороте этого ключа по проводам пойдет электроэнергия
и, входя в ключ, расположенный в основании колонны, приведет колеса в движение.
С началом движения большого колеса колеса sandhi в naala-danda также начнут
вращаться с большой скоростью. Ток войдет в пятисторонний keelaka и, поступая в
сосуд с маслом, соберет силу. Затем, проходя по двум naala, он приведет все
расположенные в опоре колеса в интенсивное движение, развивая скорость 25000
линка. Благодаря этому, вимана наберет скорость 105 krosa, или почти 250 миль в ghatika (24
минуты).
Рассмотрев механизмы, приводящие виману в движение, мы перейдем к
механизмам, задающим вимане направление. В 8 dik, или направлениях peetha, с
промежутками в 10 футов
устанавливаются слюдяные колонны толщиной 2 фута и высотой 15 футов, сияющие как
panchakantha. На этих колоннах оборудуются места для размещения пассажиров и
отсеки для размещения механизмов, как полагается для Сундара-виманы. Эти
колонны изготавливаются исключительно из слюды.
Согласно Лаллачарье, для того, чтобы вимана могла во время полета менять
курс, все ее восемь сторон снабжаются вращающимися keelaka. Необходимы два
соответствующих друг другу ключа — purva и арага (правосторонний и
левосторонний).
За счет манипуляции этими ключами можно изменить направление полета. Чтобы
манипулировать keelaka, на peetha moola с четырех сторон устанавливают naala,
или трубы в форме полумесяца, шириной и высотой 2 фута. С любой из этих
сторон, в naala вставляют четырехдюймовые металлические стержни. На них
устанавливаются колеса шириной и высотой 1 фут. Вокруг них обязательно должна быть
проложена проводка. Чтобы приводить все колеса, расположенные в naala, в
движение, в основании, центре и на обоих концах naala закрепляются большие
колеса. При повороте верхнего колеса, начинают вращаться колеса, расположенные
внутри naala. За счет этого, keela-shanku поворачивается, а следовательно, и
вимана меняет курс, повернувшись в нужном направлении.
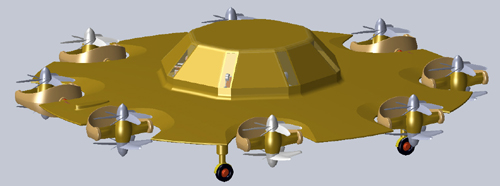
Реальный вид. Рукма-вимана.
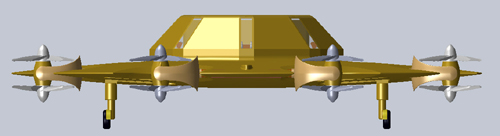
1. Вид спереди.

2. Вид справа. 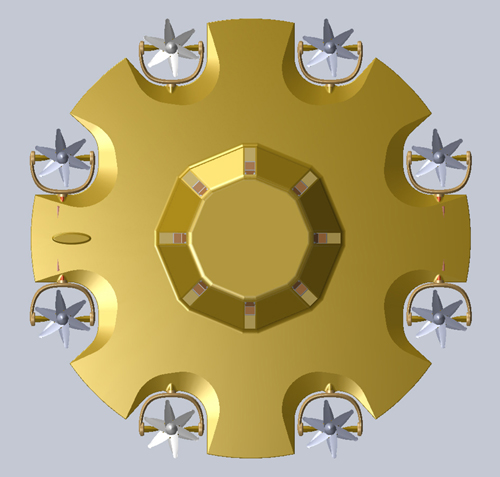
3. Вид сверху. 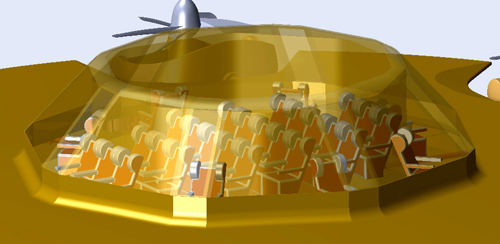
4. Внешний вид кабины ( без аппаратуры управления) 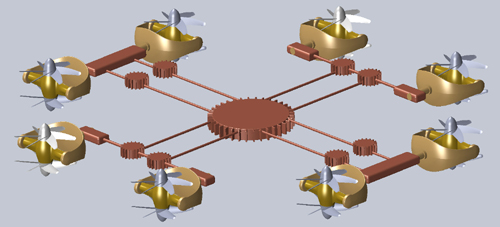
5. Двигатели и энергетическая установка. По центру расположен реактор-генератор с системой охлаждения, к периферии - устройства управления - поворотные серврприводы - электродвигатели с винтами. Примечание: В тексте трактата допущена ошибка - 1000 футов, реально на 1 нуль меньше, и тогда все остальные параметры вписываются в реальную модель. Ошибка возникла или при переводе, либо умышленно для создания масштабности, или автор трактата не умел считать больше ста и решил добавить ещё нуль. Это предположение, и оно решает проблему создания модели далёкой от гигантизма.
|